概要と特長
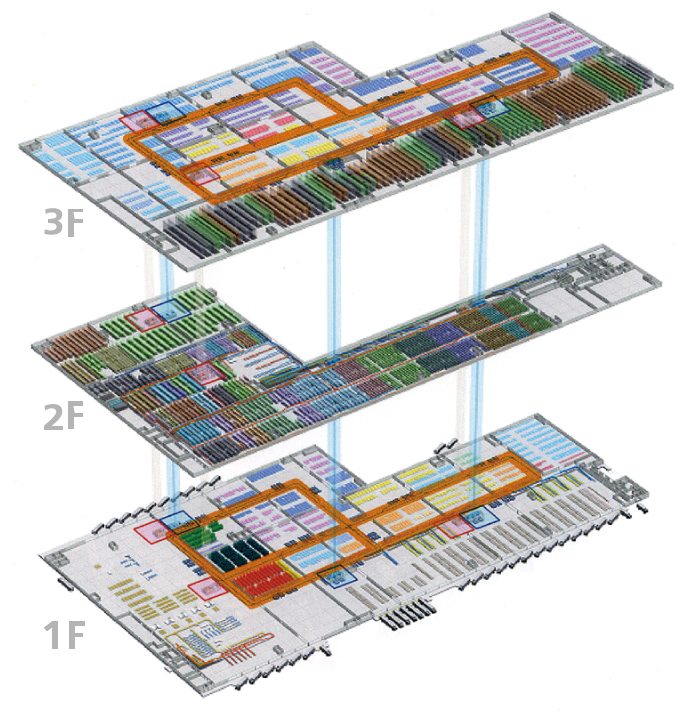
オムニ自動車部品配送システムは、オムニリフターと無人搬送車(AGV)を組み合わせ、有人フォークリフトの削減を図り、3階建ての配送センターの業務をスムーズに機能させています。入・出荷される自動車部品は、大物板金部品(荷重最大1,000kg/個、最小500kg/個)から中・小物部品まで多品種にわたりますが、出荷頻度の高いもの低いものを各階ごとに分類して保管し、入・出荷の指示はすべてコンピュータでコントロール、センター内のモノの流れを信頼性の高いものにしています。
大物部品の搬送
1Fは無人搬送車により、各エリアのステーションまで自動搬送。3Fはオムニリフターと無人搬送車の連携により、各エリアのステーションまで自動搬送します。
3F (中低頻度エリア)
- オムニリフーター取り合い:3ヶ所
- AGV寝込み:8ヶ所
- AGV荷卸し:9ヶ所
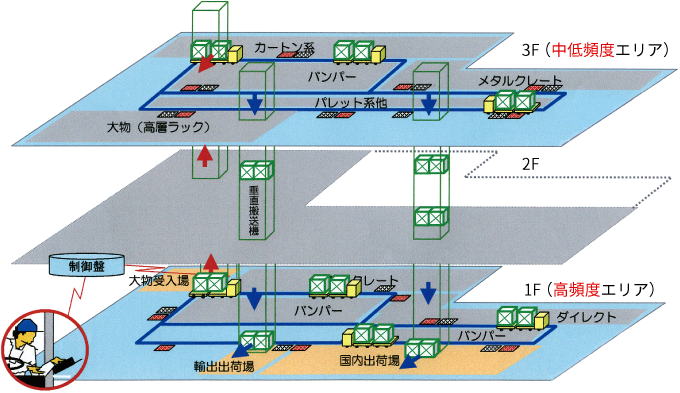
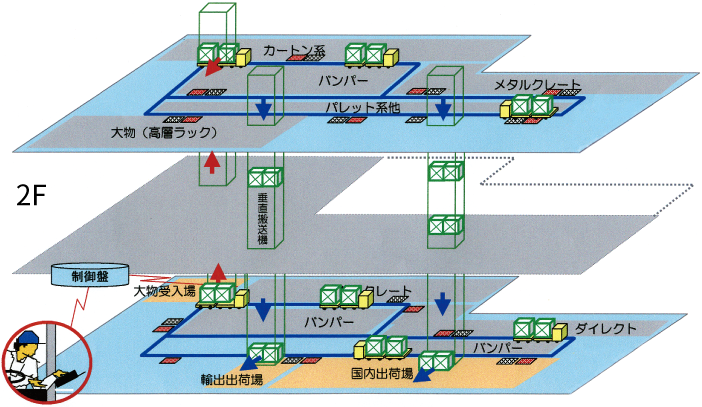
1F (高頻度エリア)
- オムニリフーター取り合い:3ヶ所
- AGV寝込み:9ヶ所
- AGV荷卸し:8ヶ所
- 寝込み・荷卸し共用:1ヶ所
主な装置
-

無人搬送車との取り合いコンベヤ(3階) -

出荷工程における無人搬送車からコンベヤへの乗り移り状況 -

ステーションコンベヤ
(搬送物重量1個当たり1,000kg) -

ステーションコンベヤ -

1階 搬入コンベヤ -

仕様
【オムニリフター仕様】
| 形式 | 1・2号機 3RZC-H-7-10 3・4・5・6号機 2RZC-H-6-10 |
|---|---|
| 運転方式 | 全自動 手動 押しボタン切り替え方式 |
| 制御方式 | 昇降制御 インバータ制御 |
| 昇降速度 | 40m/min |
| 昇降駆動 | 7.5kW インバータ制御 |
| 横行速度 | 12m/min 24m/min |
| 横行駆動 | 0.4kW インバータ制御 |
| 搬送方式 | 独立軸受け 千鳥掛けチェーン駆動 ローラコンベヤ |
| ローラ仕様 | 昇降テーブル: 114.3Φ×1,200W×127.0P×2列 積込み部: 114.3Φ×1,200W×127.0P×2列 |
| 積込方向 | 正面積み |
| 積込方法 | コンベヤライン接続&フォークリフト |
| 使用電源 | 3Φ 220V 60Hz 11.5kW/1基 |
| その他 | 安全欄 送込み機に取り付け フォークストッパー 無人搬送車取り合い 光通信器 |
(単位mm)
【ステーションコンベヤ仕様】
| 形式 | チェーン駆動ローラコンベヤ |
|---|---|
| ローラ仕様 | 114.3Φ×1,200W×127.0P×2列 |
| 軸受け | 独立型ピロー軸受け方式 |
| チェーン駆動方式 | ローラー2本千鳥掛け方式 |
| 機幅×機長×高さ | 2,600W×3,250L×550H |
| 速度 | 横行:12m/min |
| 電動機 | 0.40kW GM×2台 |
| フレーム | 鋼板折り曲げボルト固定方式 |
| ガイド | 中央:浮上式ガイド 両サイド:固定式ガイド |
| ACV取り合い | 光通信器 |
(単位mm)